Article Details
- Title: How Do Motorcycles Lean So Far Without Tipping Over?
- Author: Rhett Allain
- Date: 08/12/15
- Link: WIRED
Summary
The article begins by generally discussing the different forces involved in the example of a motorcycle. The article reminds us that Newton's Second Law can be defined as: \( \bar F_{net} = m \bar a \), and reviews what this entails. We're told that Newton's Second Law doesn't work as intended when dealing in an accelerating frame of reference; in order to make it work, a so-called "fake force" needs to be added to our system.
We are given the example of an accelerating car, with a ball hanging from the ceiling. When the car accelerates, the ball swings backwards, but why? There is no real force pushing the ball backward because the ball is accelerating forwards. What happens when we add a fake force, like so?
We are given the example of an accelerating car, with a ball hanging from the ceiling. When the car accelerates, the ball swings backwards, but why? There is no real force pushing the ball backward because the ball is accelerating forwards. What happens when we add a fake force, like so?
The fake force is in the opposite direction of the acceleration of the car, and it's the force that "pushes the ball back" in the accelerating frame of reference. It can be defined as \( \bar F_{fake} = - m \bar a_{ref} \).
The article states that most basic Physics courses don't cover these fake forces, and understandably so. We usually deal with static frames of reference, and fake forces just make things needlessly complicated. Nonetheless, our attention is turned to motorcycles. In the case of a motorcycle, its velocity vector is always changing (meaning it has acceleration), even if it appears to have constant speed. A changing velocity vector has to do with an object moving in a circle, and can be defined as \( a = \frac{ v^{2} }{ r } \), where \( v \) is the speed of the motorcycle, and \( r \) is the radius of the circle. This acceleration points to the middle of the circle, and it causes another fake force (centrifugal force) to push the rider in the opposite direction from the center.
When a driving vehicle turns, the friction force between the tires and the road is (usually) the force that pushes our vehicle towards the center of a circle. Let's look at a motorcycle that is supposedly turning to the left, from our point of view:
The article states that most basic Physics courses don't cover these fake forces, and understandably so. We usually deal with static frames of reference, and fake forces just make things needlessly complicated. Nonetheless, our attention is turned to motorcycles. In the case of a motorcycle, its velocity vector is always changing (meaning it has acceleration), even if it appears to have constant speed. A changing velocity vector has to do with an object moving in a circle, and can be defined as \( a = \frac{ v^{2} }{ r } \), where \( v \) is the speed of the motorcycle, and \( r \) is the radius of the circle. This acceleration points to the middle of the circle, and it causes another fake force (centrifugal force) to push the rider in the opposite direction from the center.
When a driving vehicle turns, the friction force between the tires and the road is (usually) the force that pushes our vehicle towards the center of a circle. Let's look at a motorcycle that is supposedly turning to the left, from our point of view:

All the forces add up to zero, but the torques do not! Similarly to a force changing the velocity of an object, torque changes the angular velocity of an object. If there is zero torque, there is no change in angular motion; torque depends on the magnitude of the force, the distance from the location of said force to the rotation point, and the angle at which our force is applied. This can be defined as \( \tau = F r \cdot \text{sin} \theta \), where \( \theta \) is the angle between \( F \) and \( r \).
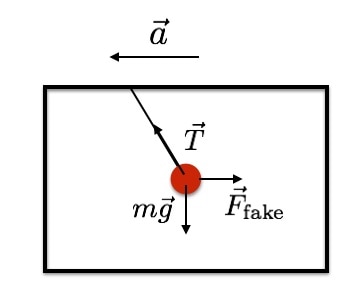
In the example above, the friction force and the fake force are located at different points. If the rider doesn't lean as he makes his turn, the net torque won't be zero, and he'll fall over. The example below shows a diagram demonstrating the forces when the rider does lean.
In the example above, the friction force and the fake force are located at different points. If the rider doesn't lean as he makes his turn, the net torque won't be zero, and he'll fall over. The example below shows a diagram demonstrating the forces when the rider does lean.

Now, both the net force and net torque are zero! Leaning the bike over allows torque due to gravity, which balances and cancels out the torque from the fake force. In the first, non-leaning example, the gravitational force was pushing directly past the main torque point, causing it to produce zero torque and making it unable to cancel the torque due to the fake force.
Questions
- What exactly is a "fake force"?
- As the name would suggest, fake forces are forces that aren't quite real. They only appear when someone takes measurements in a non-inertial frame of reference. The fake force we dealt with was due to the accelerating frame of reference.
- A common example of a fake force is "centrifugal force", which only appears because we're doing measurements from a rotating frame of reference.
Works Cited
Allain, Rhett. "How Do Motorcycles Lean So Far Without Tipping Over?" WIRED. Conde Nast, 12 Aug. 2015. Web. 19 Apr. 2017.
<https://www.wired.com/2015/08/motorcycles-lean-far-without-tipping>.
<https://www.wired.com/2015/08/motorcycles-lean-far-without-tipping>.
